Tree Growth based Graph Algorithms¶
These class of algorithms takes a Graph as input, and generates Tree, which consists of some of edges of input Graph, which are selected according to particular criteria. Some examples are
- DFS
- BFS
- Minimum Spanning Tree Problem (Prim’s and Kruskal’s Algorithm)
- Single Source Shortest Path Problem (Dijkstra’s Algorithm)
Standard import statement¶
In [6]:
import openanalysis.tree_growth as TreeGrowth
Implementation Notes¶
- The algorithm should be implemented as a method
- The algorithm works on a
networkxgraph - All algorithms start building the tree from a given source, But if source is not given, select source as the first node of Graph
def algorithm_name(G,source = None):
if source is None:
source = G.nodes()[0]
# do other work now
- As soon as node
vis visited from nodeu,yieldthe tuple containing them
# Assume that visiting is done
yield (u,v)
- To make your life easy, some data structures which comes handy while
working with Graphs are included in
OpenAnalysis.base_data_structures
Example - Dijkstra’s Algorithm¶
Dijkstra’s Algorithm finds minimum spanning tree of a graph in greedy manner. The algorithm is given below
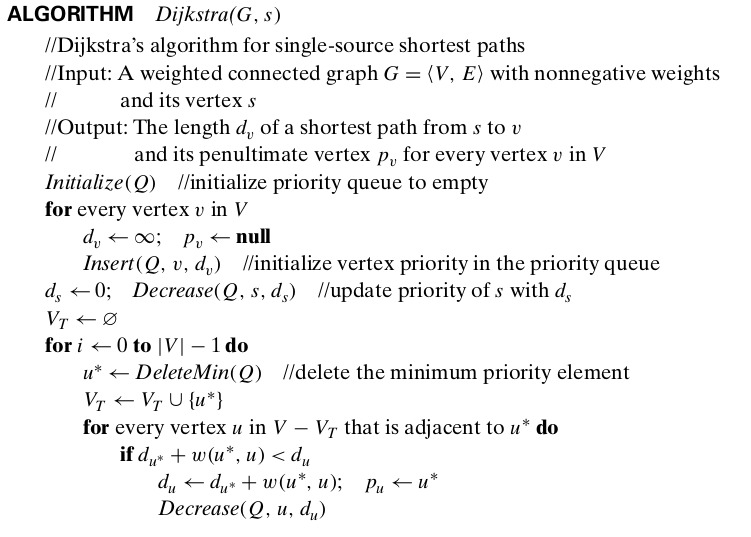
Dijkstra’s Algorithm
Implementation¶
Since we need a Priority Queue here, Let’s import it
In [7]:
from openanalysis.base_data_structures import PriorityQueue
Now, Let’s implement the algorithm
In [8]:
def dijkstra(G, source=None): # This signature is must
if source is None: source = G.nodes()[0] # selecting root as source
V = G.nodes()
dist, prev = {}, {}
Q = PriorityQueue()
for v in V:
dist[v] = float("inf")
prev[v] = None
Q.add_task(task=v, priority=dist[v])
dist[source] = 0
Q.update_task(task=source, new_priority=dist[source])
visited = set()
for i in range(0, len(G.nodes())):
u_star = Q.remove_min()
if prev[u_star] is not None:
yield (u_star, prev[u_star]) # yield the edge as soon as we visit the nodes
visited.add(u_star)
for u in G.neighbors(u_star):
if u not in visited and dist[u_star] + G.edge[u][u_star]['weight'] < dist[u]:
dist[u] = dist[u_star] + G.edge[u][u_star]['weight']
prev[u] = u_star
Q.update_task(u, dist[u])
Note how implementation looks similiar to the algorithm, except the
if block, which is used to yield the edges.
Visualizing the Algorithm¶
apply_to_graph(fun): Creates Random Geometric Graph of 100 nodes and appliesfunon it to build the tree. After building the tree, it shows original graph and the tree side by sidetree_growth_visualizer(fun): Creates Random Geometric Graph of 100 nodes and appliesfunon it to build the tree. Saves the animation of building the tree inoutput/folder
Random Geometric Graph¶
Random Geometric Graph is created using two parameters. Number of nodes
 , and radiuus
, and radiuus  . points are chosen randomly
on plane. The edge between 2 nodes is created if and only if the
distance between 2 nodes is less than
. points are chosen randomly
on plane. The edge between 2 nodes is created if and only if the
distance between 2 nodes is less than
import networkx as nx
G = nx.random_geometric_graph(100,2.3) # n,r
pos = nx.get_node_attribute('pos')
In [10]:
TreeGrowth.apply_to_graph(dijkstra)

After executing
TreeGrowth.tree_growth_visualizer(dijkstra)
go to output/ directory to see mp4 files